Inovasi Tangan Robot Modular EPFL: Bisa Merangkak Sendiri!
- Istimewa

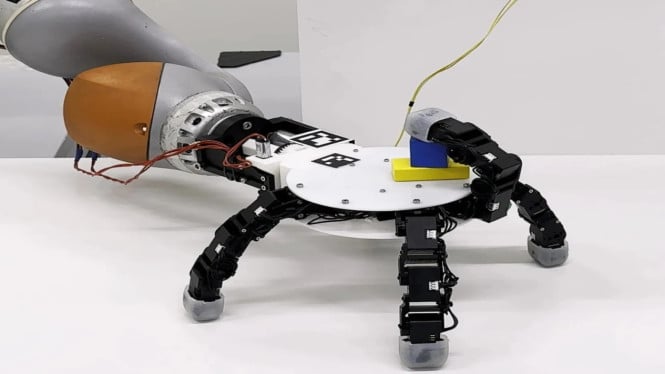
- Tangan Robot Modular ini memiliki desain simetris 6 jari, membuang batasan jempol oposisi manusia.
- Fitur utama adalah kemampuan detasemen; tangan bisa merangkak sendiri (loco-manipulasi) untuk mengambil objek di luar jangkauan lengan utama.
- Inovasi yang dikembangkan oleh EPFL ini menunjukkan peningkatan kinerja 5 sampai 10 persen dibandingkan desain robot asimetris tradisional.
- Robot ini dapat melakukan 33 jenis gerakan menggenggam manusia dan memegang banyak objek sekaligus.

Dunia robotika menyaksikan lonjakan inovasi yang signifikan. Peneliti dari École Polytechnique Fédérale de Lausanne (EPFL) baru saja memperkenalkan Tangan Robot Modular yang mendefinisikan ulang kemampuan manipulasi dan navigasi. Desain radikal ini tidak lagi meniru batasan anatomi manusia. Sebaliknya, tangan robot canggih ini justru dapat melepaskan diri dari lengannya, merangkak melintasi permukaan seperti laba-laba, dan menangani berbagai objek secara bersamaan.
Inovasi fundamental ini berasal dari Laboratorium Algoritma dan Sistem Pembelajaran EPFL, dipimpin oleh Aude Billard. Mereka memutuskan untuk tidak lagi mengikuti cetak biru biologis. Hasilnya, sebuah terobosan dalam desain robot yang sangat fungsional.

Melampaui Batasan Desain Anatomi Manusia
Tangan manusia telah lama menjadi standar emas dalam hal ketangkasan. Namun, replikasi kesempurnaan tersebut sering kali mewarisi keterbatasannya. Kita memiliki desain asimetris, dengan hanya satu jempol oposisi per tangan.
Keterbatasan ini memaksa kita untuk terus memosisikan ulang pergelangan tangan. Selain itu, tubuh sering meliuk untuk menjangkau objek yang ditempatkan secara canggung. Tim Robotika EPFL memutuskan untuk menghilangkan masalah asimetri tersebut.
Revolusi Jempol Oposisi
Para perancang menciptakan tangan simetris. Tangan ini menampilkan hingga enam jari identik. Setiap ujung jari dilapisi silikon untuk daya cengkeram maksimal.
Kecerdikan desain simetris terletak pada fleksibilitasnya. Kombinasi jari mana pun dapat membentuk pasangan oposisi untuk mencubit dan menggenggam. Tidak ada lagi kebutuhan akan jempol tunggal yang ditunjuk secara khusus.
Bahkan, tangan ini sepenuhnya dapat dibalik. Sisi telapak dan punggung tangan dapat dipertukarkan. Membaliknya tidak mengurangi efektivitas kerja sedikit pun. Ini menghilangkan kebutuhan untuk reposisi yang canggung, membuka kemungkinan menggenggam yang tidak dapat dicapai manusia.