Inovasi Tangan Robot Modular EPFL: Bisa Merangkak Sendiri!
- Istimewa
Fitur Detasemen: Era Loco-Manipulasi Robot
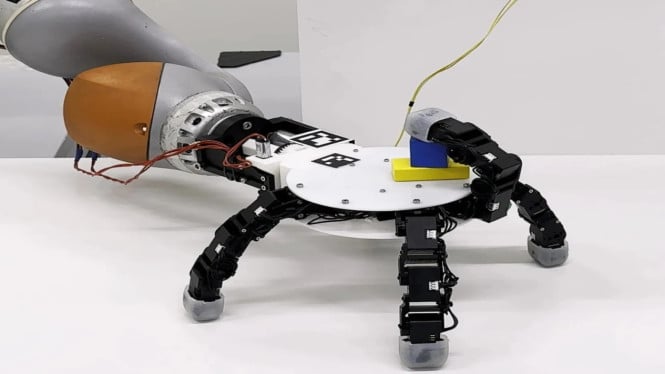
Fitur yang paling mengejutkan adalah kemampuan tangan untuk benar-benar pergi dari tugasnya. Tangan ini menggunakan sistem baut yang digerakkan motor dan sambungan magnetis. Sistem memungkinkan tangan terlepas dari lengan robot utama.
Setelah terlepas, Tangan Robot Modular ini merangkak secara mandiri. Fungsinya adalah mengambil objek yang berada di luar jangkauan lengan. Bayangkan robot gudang yang membutuhkan benda kecil yang letaknya sedikit tersembunyi.

Alih-alih memosisikan ulang seluruh sistem robot, tangan itu berjalan. Ia mengambil yang dibutuhkan dan kembali, menyerupai hewan peliharaan yang sangat cerdas. Konsep ini disebut "loco-manipulasi," penggabungan antara lokomosi (pergerakan) dan manipulasi.
Dampak Industri dan Eksplorasi Luar Angkasa

Aplikasi praktis dari Tangan Robot Modular sangat mencengangkan. Dalam pengaturan industri, loco-manipulasi merevolusi interaksi robot dengan lingkungan mereka. Robot layanan mampu menavigasi ruang kompleks. Mereka menangani banyak tugas tanpa intervensi manusia terus-menerus.
Dalam robotika eksplorasi, seperti penjelajah Mars atau kendaraan laut dalam, tangan yang dapat dilepas sangat bernilai. Tangan bisa menyelidiki ruang sempit. Mereka juga dapat mengambil sampel dari area yang tidak dapat diakses oleh badan utama robot.
Paradigma Baru dalam Teknik Robotika EPFL
Penelitian yang dipublikasikan di jurnal Nature ini membuktikan bahwa desain simetris memberikan kinerja yang terukur lebih baik. Desain ini menghasilkan peningkatan jarak merangkak 5 hingga 10 persen. Kinerja ini lebih unggul dibandingkan konfigurasi asimetris tradisional.
Telapak tangan berdiameter 160 mm ini menampung motor. Motor tersebut meniru gerakan maju alami sendi jari manusia. Namun, motor tersebut tidak terkekang oleh batasan manusiawi.
Proyek ini bukan sekadar pencapaian teknis. Ini merupakan pergeseran filosofis. Selama bertahun-tahun, robotika terobsesi meniru bentuk dan fungsi manusia. Namun, dengan mempertanyakan apakah desain manusia benar-benar optimal untuk semua tugas, tim Robotika EPFL menciptakan sesuatu yang melampaui cetak biru biologis kita. Inovasi seringkali menuntut kita meninggalkan asumsi. Jadi, masa depan robot tidak lagi dibatasi oleh kendala fisik manusia.